TorpedoAUV
Images
Description
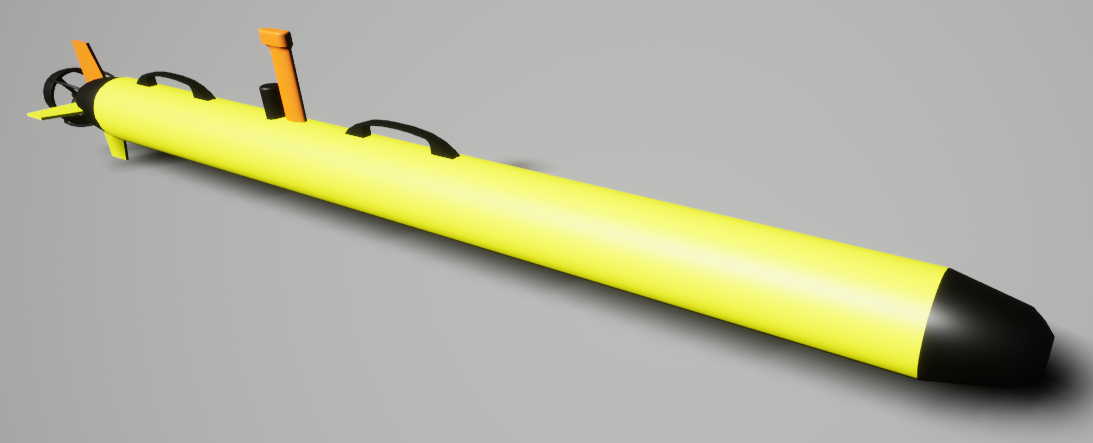
A generic AUV.
See the TorpedoAUV.
Control Schemes
- AUV Fins (``0``)
Takes in a 5 length vector. The first element is the right fin angle from -45 to 45 degrees, then top, left, and bottom. The last element is the “thruster” with a value of -100 to 100.
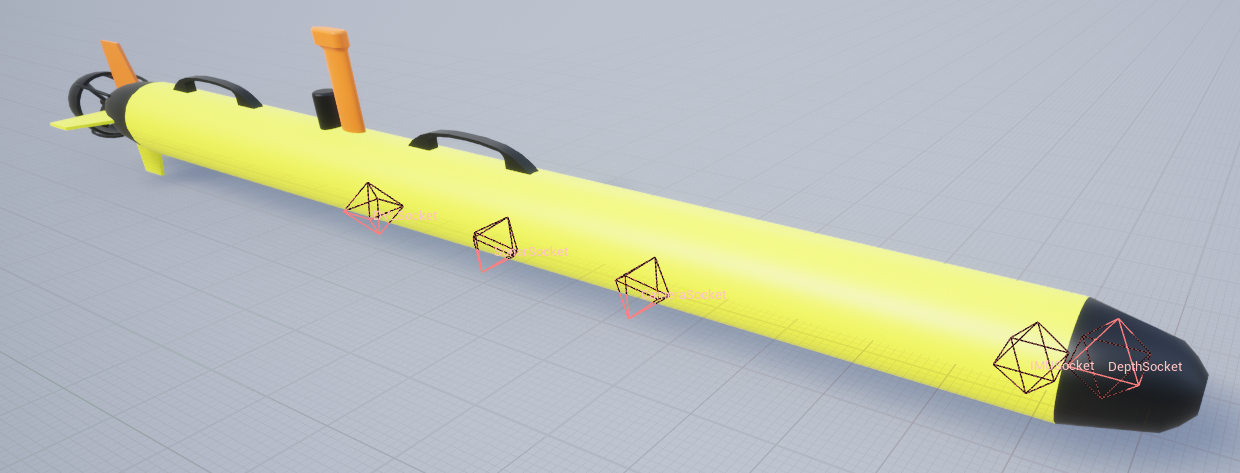
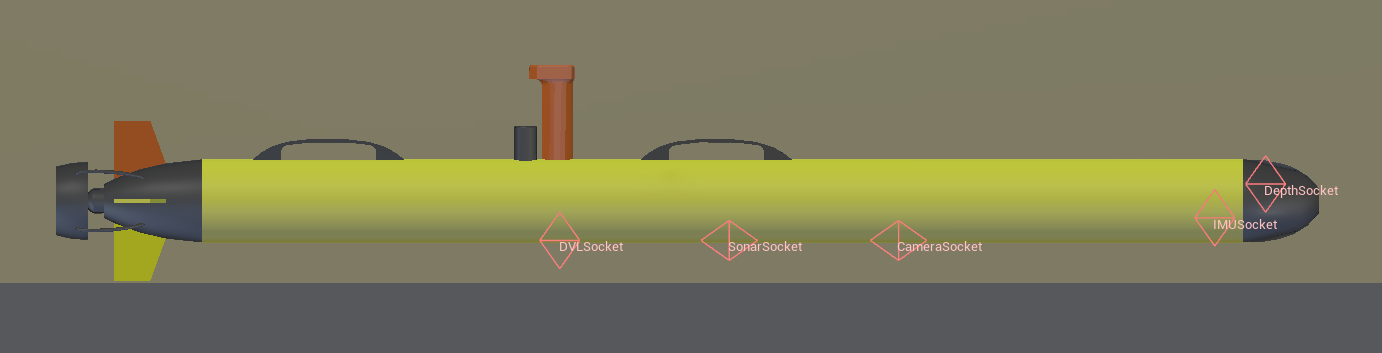
Sockets
COMCenter of massDVLSocketLocation of the DVLIMUSocketLocation of the IMU.DepthSocketLocation of the depth sensor.SonarSocketLocation of the sonar sensor.Viewportwhere the robot is viewed from.