HoveringAUV
Images
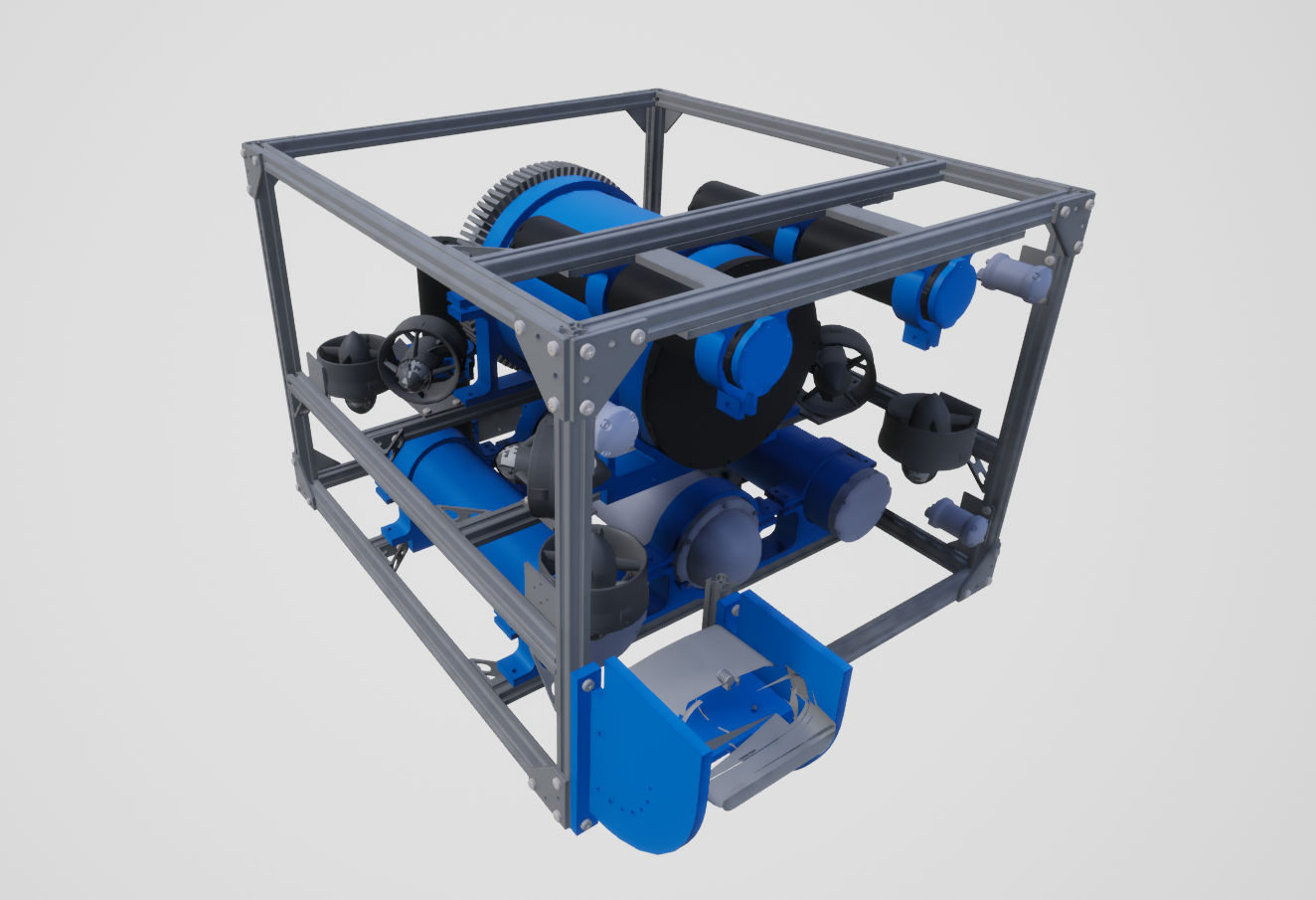
Description
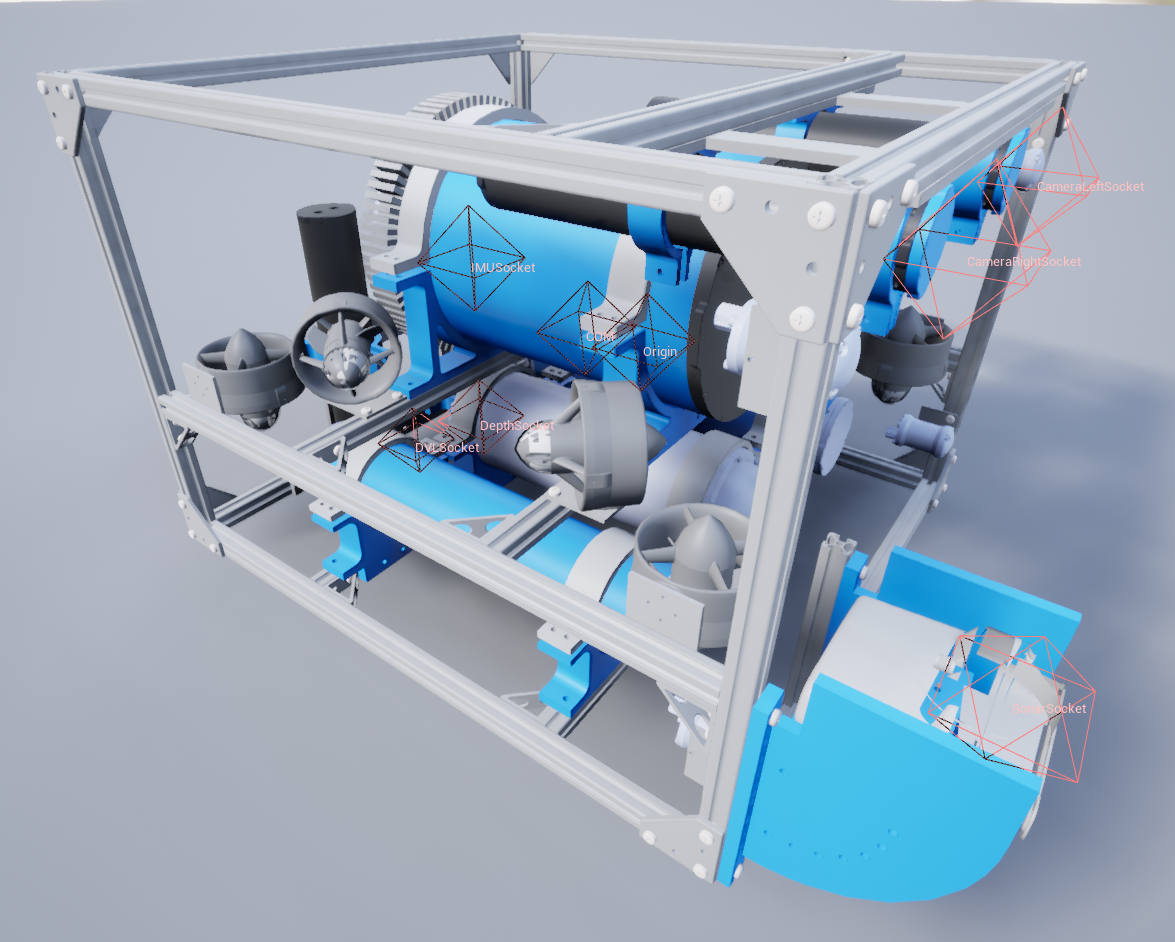
Our custom in-house hovering AUV.
See the HoveringAUV.
Control Schemes
- AUV Thrusters (``0``)
An 8-length floating point vector used to specify the control on each thruster. They begin with the front right vertical thrusters, then goes around counter-clockwise, then repeat the last four with the sideways thrusters.
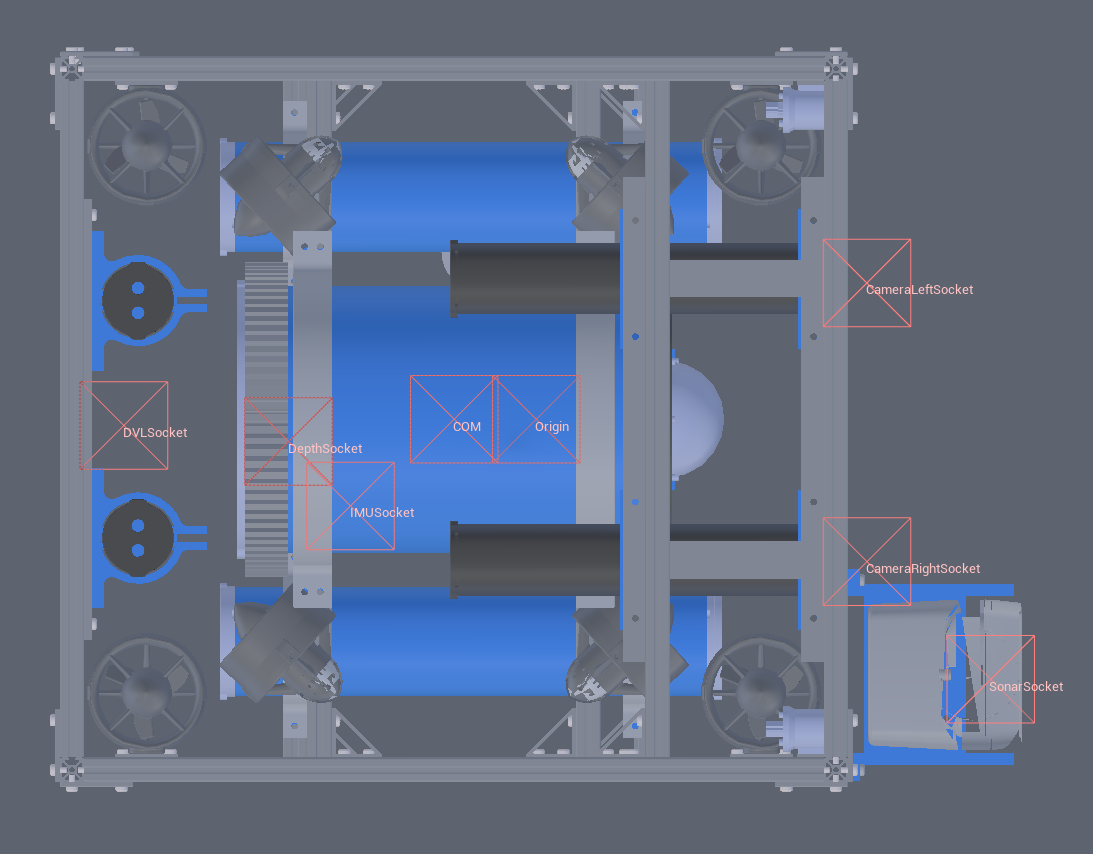
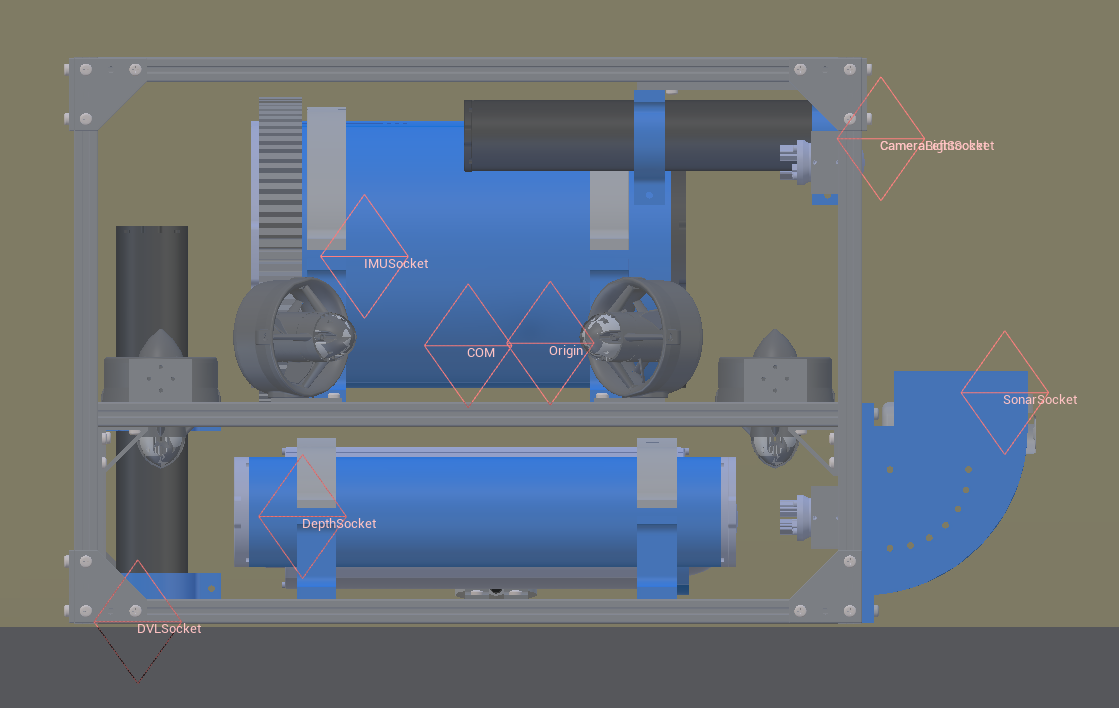
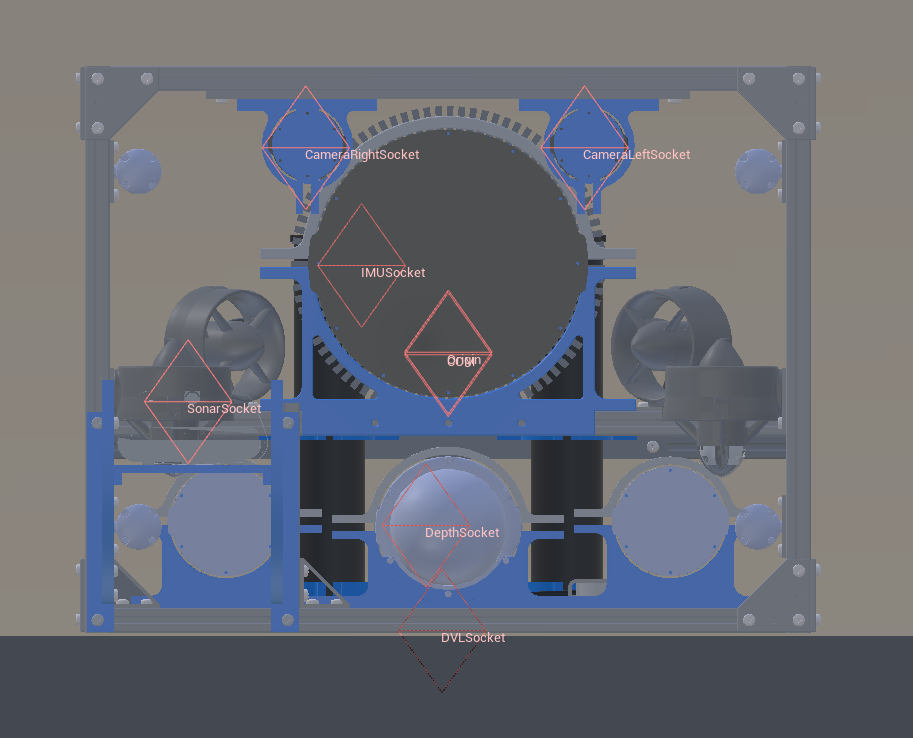
Sockets
COMCenter of massDVLSocketLocation of the DVLIMUSocketLocation of the IMU.DepthSocketLocation of the depth sensor.SonarSocketLocation of the sonar sensor.CameraRightSocketLocation of the left camera.CameraLeftSocketLocation of the right camera.Origintrue center of the robotViewportwhere the robot is viewed from.