SurfaceVessel
Images

Description
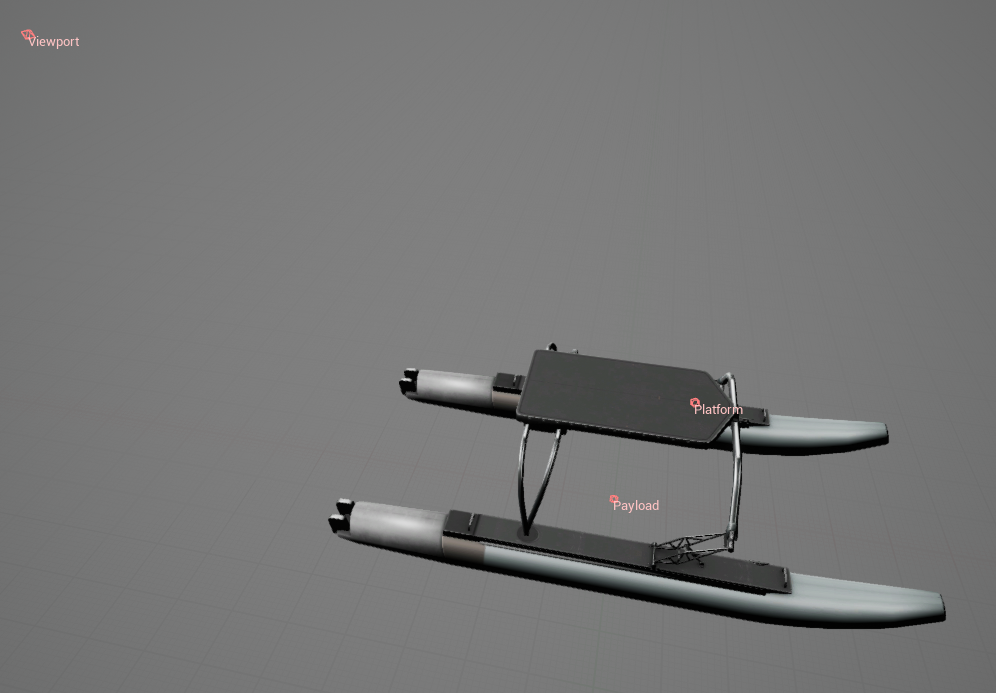
A simple surface vessel with 2 thrusters for propolsion.
See the SurfaceVessel.
Control Schemes
- Thrusters (``0``)
An 2-length floating point vector used to specify the control on each thruster. First one is left, second is right.
- PD Controller (``1``)
A 2-length floating point vector of desired x and y position in the global frame. A basic PD controller has been implemented to move the vehicle to that position using the correct thruster forces.
- Custom Dynamics (``2``)
A 6-length floating point vector of linear and angular accelerations in the global frame. This is to be used for implementing custom dynamics. Besides collisions, all other forces and torques - including gravity, buoyancy, and damping - have been disabled in the simulator to allow for a clean slate for custom dynamics.
Sockets
Payloadwhere the payload with sensors will be in the water. Pointed downward.Platformsensors placed on platform.Viewportwhere the robot is viewed from.